Robotc coding
|
|
|
|
|

|
|
|

Robotc coding Conclusion questions
Coding Conclusion Questions
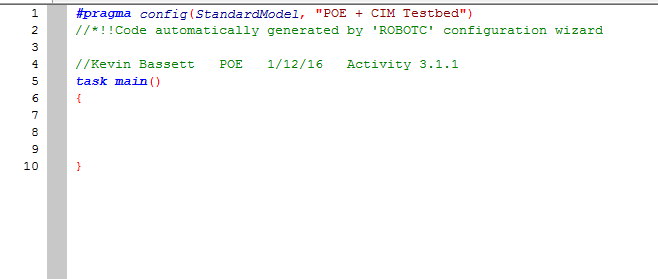
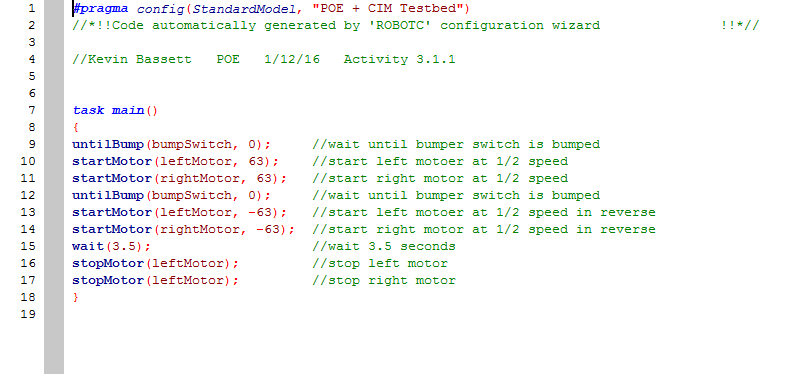
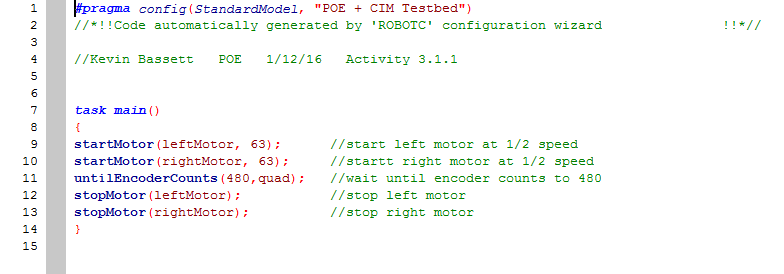
3.1.1
1. Describe how these motors and sensors may be used.
Motors and sensors are used in when controlling robots.
2. Describe scenarios where the motors or sensors did not respond as you would predict.
If i accidentally put the wrong port and the left motor starts instead of the right motor.
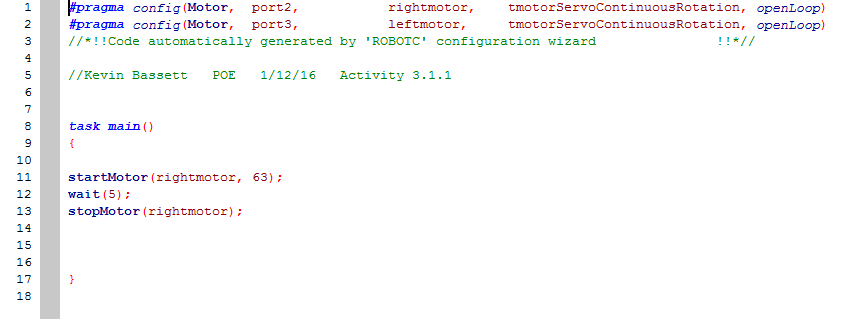
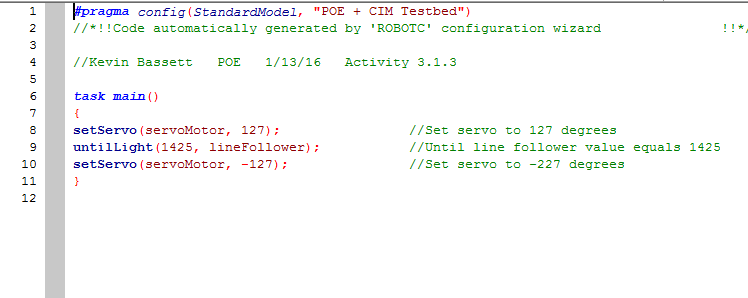
3.1.2
1. Describe any challenges that you encountered while developing the program.
I struggled with remembering to have it in "natural language."
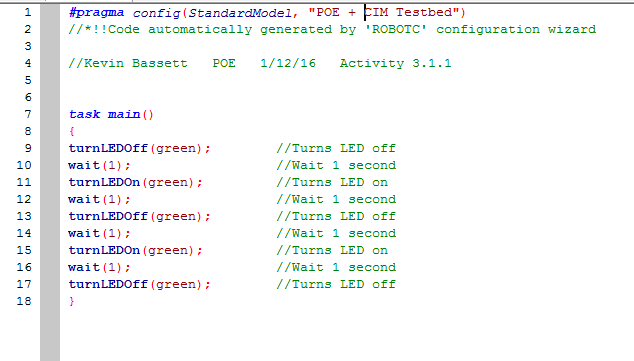
2. Describe how these outputs might be used in an application.
This could be used on a red light so when the sensor detects a car there it will begin to change the light green.
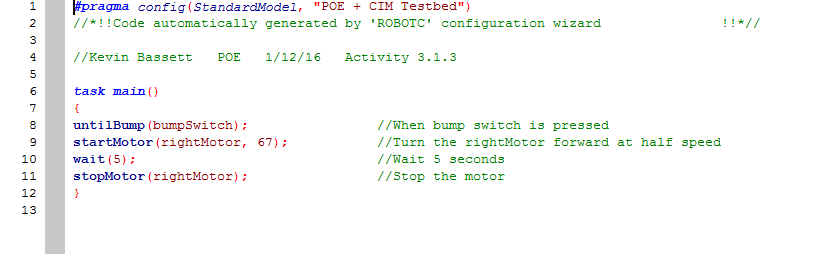
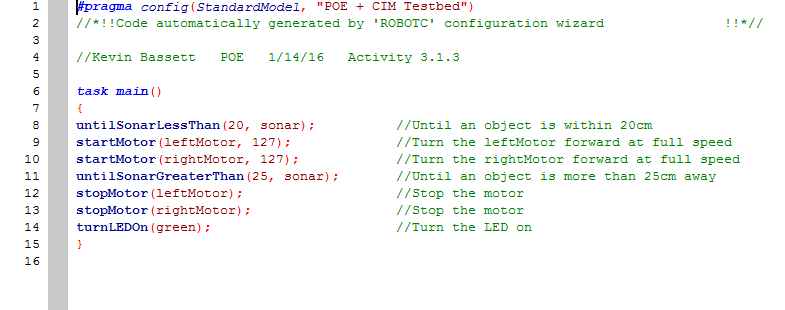
3.1.3
1. Describe any challenges that you encountered while developing the program.
I was confused with the servoMotor.
2. Describe three applications for the use of sensors that you worked with in this activity.
The encoder is like a time bomb, because it waits a certain amount of time before it goes off. The potentiometer could be anything that rotates since it goes off of how many rotations. The light sensor could be like the "Auto Brightness" on your phone, when it detects that it is dark, it will turn the brightness up, and the opposite for when its bright.
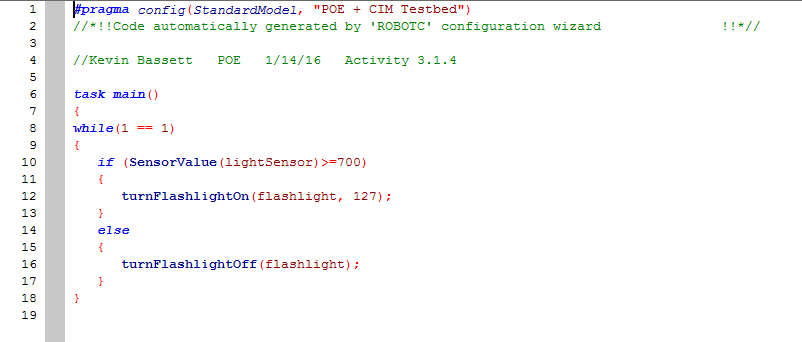
3.1.4
1. Describe any challenges that you encountered while developing the programs.
I found the If-else structures and while loops hard because they took up a lot of time.
2. Describe one application each for While loops and If-Else structures.
The If-Else structures allow the computer to make decisions as long as it is under certain conditions. The While Loop is like a sensor on a tiolet because it must be used all day long.
